









Actualmente Volvo Trucks y la compañía de gestión de residuos sueca Renova están probando e investigando el modo en que los vehículos automatizados pueden aumentar la seguridad y la eficacia en la gestión de residuos, además de crear un mejor entorno de trabajo para los conductores. Los sistemas automatizados que se están probando son, en principio, los mismos que están instalados en el camión autónomo Volvo que se utiliza en la mina de Kristineberg, en el norte de Suecia, desde otoño de 2016.
“No cabe duda de que la conducción de un vehículo comercial pesado en un área residencial urbana con calles estrechas y usuarios vulnerables en el camino requiere grandes medidas de seguridad, incluso cuando la velocidad del vehículo no supera el ritmo de marcha normal. El camión de recolección de basura que estamos probando controla en todo momento sus alrededores y se detiene inmediatamente si de repente aparece un obstáculo en la ruta. Al mismo tiempo, el sistema automatizado crea unos mejores requisitos previos para que el conductor esté atento a todo lo que ocurre cerca del camión”, afirma Carl Johan Almqvist, director de seguridad vial y de producto, Volvo Trucks.
Cuando el camión de recolección de basuras automatizado se utiliza por primera vez en un área nueva, debe conducirse de forma manual para que el sistema de abordo controle y trace un mapa de la ruta con la ayuda de los sensores y la tecnología GPS. Cuando el camión ingrese la próxima vez en la misma zona, sabrá exactamente qué ruta debe seguir y donde debe pararse.
En la primera parada con el sistema automatizado activado, el conductor baja de la cabina, se dirige a la parte posterior del camión, coloca el contenedor con ruedas y lo vacía exactamente igual que se hace hoy día utilizando los controles correspondientes. Una vez completada la operación, el camión se desplaza automáticamente hasta el próximo contenedor tras recibir la orden del conductor. El conductor recorre la misma ruta que el camión para así tener siempre una visión completa de lo que ocurre en la dirección de desplazamiento.
¿Y por qué el camión se desplaza marcha atrás en lugar de hacia delante?
“Al desplazarse marcha atrás, el conductor puede mantenerse cerca del compactador en lugar de tener que ir de la parte posterior a la cabina cada vez que se mueve el camión. Y como el conductor no tiene que subir y bajar de la cabina cada vez que arranque y pare el motor, existe menos riesgo de lesiones relacionadas con el trabajo, como tensión en las rodillas y en otras articulaciones”, afirma Hans Zachrisson, director de desarrollo estratégico de Renova.
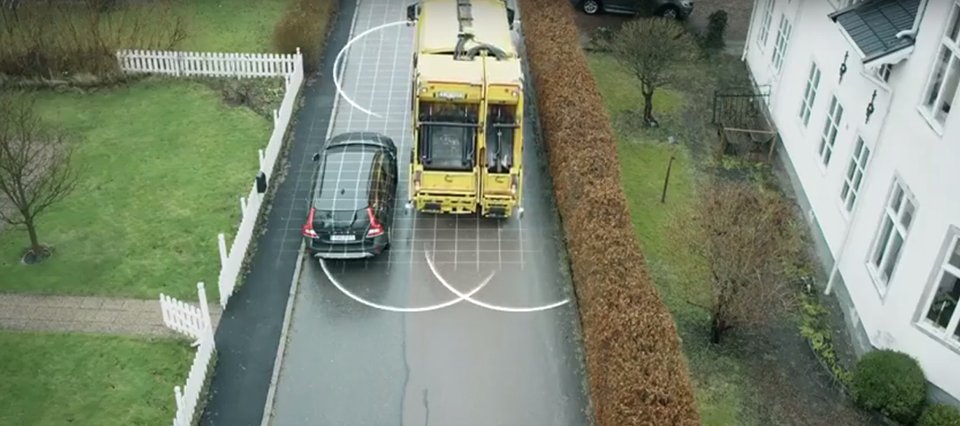
En otras situaciones, la marcha atrás es una maniobra bastante arriesgada, ya que para el conductor puede resultar complicado ver quién o qué está detrás del vehículo, incluso en el caso de que haya instalada una cámara. En ciertas áreas, no está permitido dar marcha atrás con un vehículo comercial pesado por razones de seguridad; en otras, es necesario que haya un copiloto detrás del camión para garantizar que la ruta está libre antes de que el vehículo pueda dar marcha atrás. La solución que se está probando ha sido diseñada para eliminar estos problemas. Como los sensores controlan el área que rodea el camión de recolección de basura, la conducción es igual de segura independientemente de la dirección en la que se desplace el vehículo. Y si, por ejemplo, hay un coche aparcado bloqueando la calle, el camión de recolección de basuras puede sortear automáticamente el obstáculo siempre y cuando haya suficiente espacio al lado.
Dado que los sistemas automatizados optimizan el cambio de marchas, la dirección y la velocidad, también se puede reducir el consumo de combustible y las emisiones.
Aunque ya existe la tecnología, todavía hace falta mucha investigación, pruebas y desarrollo para que los camiones de recolección de basura autónomos sean una realidad. Este proyecto conjunto continuará hasta finales de 2017 y, a continuación, se hará una evaluación extremadamente exhaustiva de la funcionalidad, la seguridad y, sobre todo, la aceptación de este tipo de vehículos entre los conductores, otros usuarios de las calles y los residentes locales. Es probable que estos vehículos con distintos grados de automatización se introduzcan antes en aplicaciones en las que las tareas de transporte tengan lugar en áreas estrictamente limitadas, como pueden ser minas y terminales de carga.











